This project was done during diploma course ‘How to make (almost) anything’ as graduation project, a digital prototyping diploma program taught by Neil Gershenfeld, Director at Center for Bits and Atom, MIT. This program helps to exposes to over 20 skills over 20 weeks including Web Design, Machine Design, Project Management, Electronic Design, 3D Scanning and Printing, Embedded Programming, etc. These skills are then showcased through the ‘Graduation Project’.
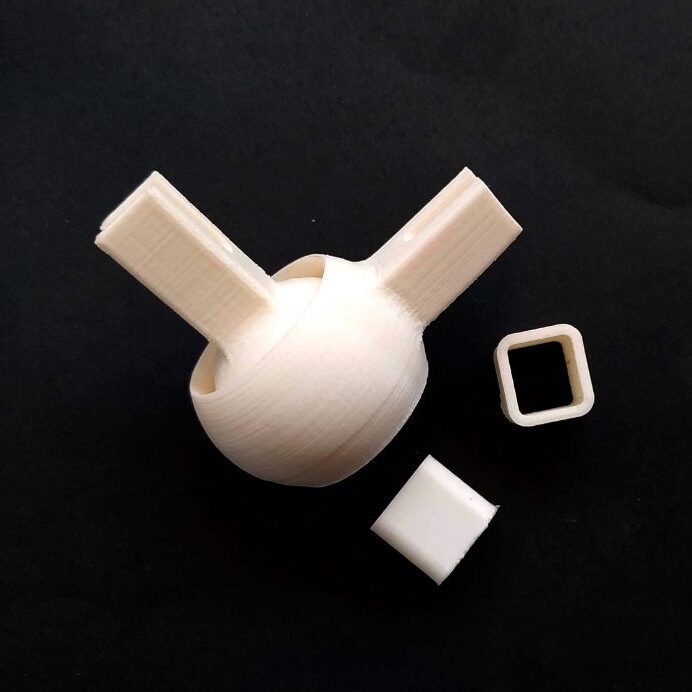
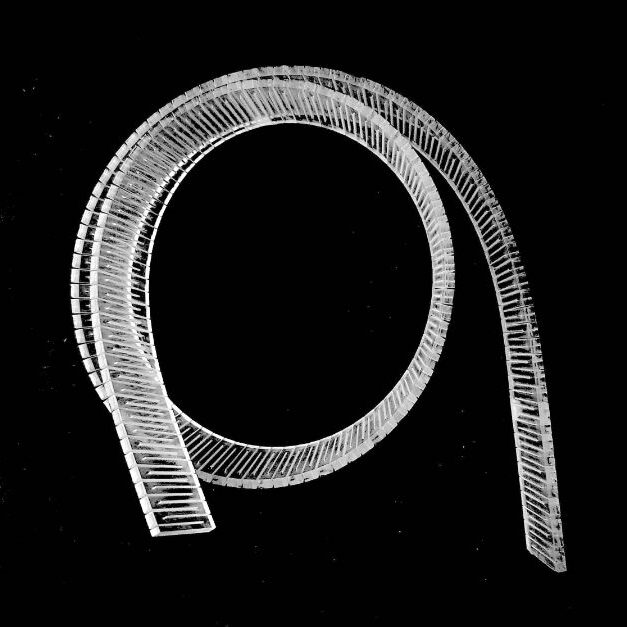
This project was a group project done during the week titled ‘Machine Design Week’ split over two weeks. We made an LED Maze which can be controlled using accelerometer or joystick. It used dual axis mechanism. and the movement in Z axis was primary in this case.